Loading...
Searching...
No Matches
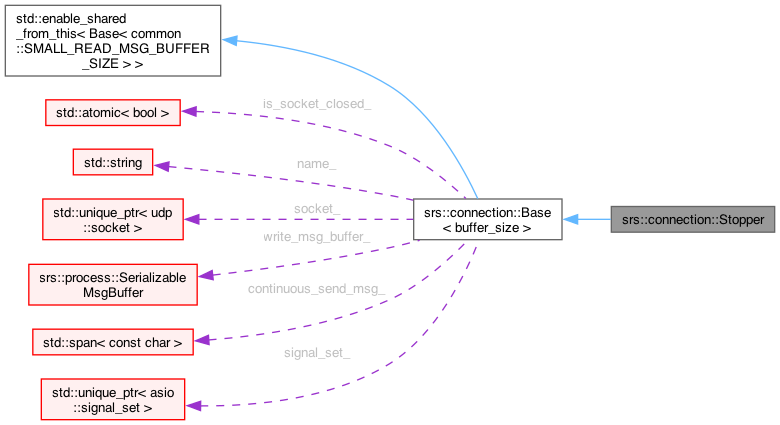
srs::connection::Stopper Class Reference
#include <Connections.hpp>
Collaboration diagram for srs::connection::Stopper:
Public Member Functions | |
| Stopper (const Stopper &)=delete | |
| Deleted copy constructor (rule of 5). | |
| Stopper (Stopper &&)=delete | |
| Deleted move constructor (rule of 5). | |
| Stopper & | operator= (const Stopper &)=delete |
| Deleted copy assignment operator (rule of 5). | |
| Stopper & | operator= (Stopper &&)=delete |
| Deleted move assignment operator (rule of 5). | |
| Stopper (std::string_view name) | |
| Constructor for Stopper connection class. | |
| Stopper () | |
| ~Stopper ()=default | |
| Destructor for Stopper connection class. | |
| Public Member Functions inherited from srs::connection::CommandBase | |
| CommandBase (const std::string_view name) | |
| void | send_message_from (this auto &&self, const std::shared_ptr< FecCommandSocket > &socket) |
| auto | check_response (std::span< char > response_msg) const -> bool |
| void | set_remote_endpoint (asio::ip::udp::endpoint endpoint) |
| auto | get_name () const -> std::string_view |
| auto | get_remote_endpoint () -> const udp::endpoint & |
| auto | get_response_msg () const -> std::string_view |
| auto | get_remote_ip_string () const |
| auto | get_remote_port () const |
Static Public Member Functions | |
| static auto | get_send_suffix () -> const auto & |
| static auto | get_suffix () -> std::span< const CommunicateEntryType > |
Static Private Attributes | |
| static constexpr std::array< CommunicateEntryType, 3 > | send_suffix_ = { 0, 15, 0 } |
Additional Inherited Members | |
| Protected Member Functions inherited from srs::connection::CommandBase | |
| void | set_write_response_msg (const std::vector< CommunicateEntryType > &msg, uint16_t address) |
Detailed Description
Definition at line 36 of file Connections.hpp.
Constructor & Destructor Documentation
◆ Stopper() [1/4]
|
delete |
Deleted copy constructor (rule of 5).
◆ Stopper() [2/4]
|
delete |
Deleted move constructor (rule of 5).
◆ Stopper() [3/4]
|
explicit |
Constructor for Stopper connection class.
- Parameters
-
name Name of the command
Definition at line 23 of file Connections.cpp.
◆ Stopper() [4/4]
| srs::connection::Stopper::Stopper | ( | ) |
Definition at line 30 of file Connections.cpp.
◆ ~Stopper()
|
default |
Destructor for Stopper connection class.
The destructor change the Status::is_acq_off to be true
- See also
- Status
Member Function Documentation
◆ get_send_suffix()
|
inlinestatic |
Definition at line 76 of file Connections.hpp.
◆ get_suffix()
|
inlinestatic |
Definition at line 77 of file Connections.hpp.
◆ operator=() [1/2]
Deleted copy assignment operator (rule of 5).
◆ operator=() [2/2]
Deleted move assignment operator (rule of 5).
Member Data Documentation
◆ send_suffix_
|
staticconstexprprivate |
Definition at line 83 of file Connections.hpp.
The documentation for this class was generated from the following files:
- backend/srs/connections/Connections.hpp
- backend/srs/connections/Connections.cpp