class HKalTrackSite: public TObject
_HADES_CLASS_DESCRIPTION A track site stores information about a measurement hit and parameters of the Kalman filter track states (prediction, filtering, smoothing, inverse filtering) for this hit. The hit object for a site may be replaced with the setHit(const HKalMdcHit &newhit) function. The site provides read/write access to the state vectors and the matrices for all track states via the setState* functions. The dimension of the measurement vector and track state vector must be defined when building the object and may not be changed later on. Track states can be stored in two coordinate systems: a system common for all measurement sites (usually sector coordinate) and coordinates defined by a virtual layer. The virtual layer has to be defined with the setHitVirtPlane() function. The functions transVirtLayToSec() and transSecToVirtLay() calculate and store the track state vectors and covariance matrices in the other coordinate system. The virtual layer coordinate system is used for drift chamber wire hits where the measurement point does not lie on the measurement layer.
Function Members (Methods)
public:
| HKalTrackSite(const HKalTrackSite&) | |
| HKalTrackSite(Int_t measDim, Int_t stateDim, Int_t stateDimVirtLay = 5) | |
| virtual | ~HKalTrackSite() |
| void | TObject::AbstractMethod(const char* method) const |
| virtual void | addHit(HKalMdcHit* newhit) |
| virtual void | TObject::AppendPad(Option_t* option = "") |
| virtual void | TObject::Browse(TBrowser* b) |
| virtual void | calcJacLayToSec(TMatrixD& jac, const TVectorD& svLay, const HKalPlane& plane) const |
| virtual void | calcJacSecToLay(TMatrixD& jac, const TVectorD& svSec, const HKalPlane& plane) const |
| static TClass* | Class() |
| virtual const char* | TObject::ClassName() const |
| virtual void | TObject::Clear(Option_t* = "") |
| virtual void | clearHits() |
| virtual TObject* | TObject::Clone(const char* newname = "") const |
| virtual Int_t | TObject::Compare(const TObject* obj) const |
| virtual void | TObject::Copy(TObject& object) const |
| virtual void | TObject::Delete(Option_t* option = "")MENU |
| virtual Int_t | TObject::DistancetoPrimitive(Int_t px, Int_t py) |
| virtual void | TObject::Draw(Option_t* option = "") |
| virtual void | TObject::DrawClass() constMENU |
| virtual TObject* | TObject::DrawClone(Option_t* option = "") constMENU |
| virtual void | TObject::Dump() constMENU |
| virtual void | TObject::Error(const char* method, const char* msgfmt) const |
| virtual void | TObject::Execute(const char* method, const char* params, Int_t* error = 0) |
| virtual void | TObject::Execute(TMethod* method, TObjArray* params, Int_t* error = 0) |
| virtual void | TObject::ExecuteEvent(Int_t event, Int_t px, Int_t py) |
| virtual void | TObject::Fatal(const char* method, const char* msgfmt) const |
| virtual TObject* | TObject::FindObject(const char* name) const |
| virtual TObject* | TObject::FindObject(const TObject* obj) const |
| virtual Int_t | getCell(Int_t idx = 0) const |
| virtual Double_t | getChi2() const |
| virtual Option_t* | TObject::GetDrawOption() const |
| static Long_t | TObject::GetDtorOnly() |
| virtual const TMatrixD& | getEffErrMat() const |
| virtual const TVectorD& | getEffMeasVec() const |
| virtual Double_t | getEnergyLoss() const |
| virtual const TMatrixD& | getErrMat(Int_t idx = 0) const |
| virtual const TVectorD& | getErrVec(Int_t idx = 0) const |
| virtual const HKalMdcHit& | getHit(Int_t idx = 0) const |
| virtual Double_t | getHitChi2(Int_t idx = 0) const |
| virtual Double_t | getHitDriftTime(Int_t idx = 0) const |
| virtual Double_t | getHitDriftTimeErr(Int_t idx = 0) const |
| virtual Float_t | getHitImpactAngle(Int_t idx = 0) const |
| virtual const HKalMdcMeasLayer& | getHitMeasLayer() const |
| virtual Double_t | getHitsTotalWeight() const |
| virtual Double_t | getHitTimeTof(Int_t idx = 0) const |
| virtual Int_t | getHitType() const |
| virtual const TVectorD& | getHitVec(Int_t idx = 0) const |
| virtual void | getHitVec3(TVector3& hit3, Int_t idx = 0) const |
| virtual const HKalPlane& | getHitVirtPlane(Int_t idx = 0) const |
| virtual Double_t | getHitWeight(Int_t idx = 0) const |
| virtual Double_t | getHitWeightHist(Int_t iDaf, Int_t idx = 0) const |
| virtual void | getHitWirePts(TVector3& wire1, TVector3& wire2, Int_t idx = 0) const |
| virtual const char* | TObject::GetIconName() const |
| virtual Bool_t | getIsActive() const |
| virtual Int_t | getLayer(Int_t idx = 0) const |
| virtual Int_t | getMeasDim() const |
| virtual Int_t | getModule(Int_t idx = 0) const |
| virtual const char* | TObject::GetName() const |
| virtual Int_t | getNcompetitors() const |
| virtual char* | TObject::GetObjectInfo(Int_t px, Int_t py) const |
| static Bool_t | TObject::GetObjectStat() |
| virtual Option_t* | TObject::GetOption() const |
| virtual void | getPosAndDirFromState(TVector3& pos, TVector3& dir, Kalman::kalFilterTypes stateType) const |
| virtual Int_t | getSector(Int_t idx = 0) const |
| virtual const HKalTrackState& | getState(Kalman::kalFilterTypes stateType, Kalman::coordSys coord = kSecCoord) const |
| virtual const TMatrixD& | getStateCovMat(Kalman::kalFilterTypes stateType, Kalman::coordSys coord = kSecCoord) const |
| virtual Int_t | getStateDim(Kalman::coordSys coord = kSecCoord) const |
| virtual Double_t | getStateParam(Kalman::kalFilterTypes stateType, Kalman::kalStateIdx par, Kalman::coordSys coord = kSecCoord) const |
| virtual const TMatrixD& | getStateProcMat(Kalman::kalFilterTypes stateType, Kalman::coordSys coord = kSecCoord) const |
| virtual const TMatrixD& | getStateProjMat(Kalman::kalFilterTypes stateType = kFiltered, Kalman::coordSys coord = kSecCoord) const |
| virtual const TMatrixD& | getStatePropMat(Kalman::kalFilterTypes stateType, Kalman::coordSys coord = kSecCoord) const |
| virtual const TVectorD& | getStateVec(Kalman::kalFilterTypes stateType, Kalman::coordSys coord = kSecCoord) const |
| virtual const char* | TObject::GetTitle() const |
| virtual UInt_t | TObject::GetUniqueID() const |
| virtual Bool_t | TObject::HandleTimer(TTimer* timer) |
| virtual ULong_t | TObject::Hash() const |
| virtual void | TObject::Info(const char* method, const char* msgfmt) const |
| virtual Bool_t | TObject::InheritsFrom(const char* classname) const |
| virtual Bool_t | TObject::InheritsFrom(const TClass* cl) const |
| virtual void | TObject::Inspect() constMENU |
| void | TObject::InvertBit(UInt_t f) |
| virtual TClass* | IsA() const |
| virtual Bool_t | TObject::IsEqual(const TObject* obj) const |
| virtual Bool_t | TObject::IsFolder() const |
| Bool_t | TObject::IsOnHeap() const |
| virtual Bool_t | TObject::IsSortable() const |
| Bool_t | TObject::IsZombie() const |
| virtual void | TObject::ls(Option_t* option = "") const |
| void | TObject::MayNotUse(const char* method) const |
| virtual Bool_t | TObject::Notify() |
| void | TObject::Obsolete(const char* method, const char* asOfVers, const char* removedFromVers) const |
| static void | TObject::operator delete(void* ptr) |
| static void | TObject::operator delete(void* ptr, void* vp) |
| static void | TObject::operator delete[](void* ptr) |
| static void | TObject::operator delete[](void* ptr, void* vp) |
| void* | TObject::operator new(size_t sz) |
| void* | TObject::operator new(size_t sz, void* vp) |
| void* | TObject::operator new[](size_t sz) |
| void* | TObject::operator new[](size_t sz, void* vp) |
| HKalTrackSite& | operator=(const HKalTrackSite&) |
| virtual void | TObject::Paint(Option_t* option = "") |
| virtual void | TObject::Pop() |
| virtual void | print(Option_t* opt = "") const |
| virtual void | TObject::Print(Option_t* option = "") const |
| virtual Int_t | TObject::Read(const char* name) |
| virtual void | TObject::RecursiveRemove(TObject* obj) |
| void | TObject::ResetBit(UInt_t f) |
| virtual void | TObject::SaveAs(const char* filename = "", Option_t* option = "") constMENU |
| virtual void | TObject::SavePrimitive(ostream& out, Option_t* option = "") |
| virtual void | setActive(Bool_t active) |
| void | TObject::SetBit(UInt_t f) |
| void | TObject::SetBit(UInt_t f, Bool_t set) |
| virtual void | setChi2(Double_t c) |
| virtual void | TObject::SetDrawOption(Option_t* option = "")MENU |
| static void | TObject::SetDtorOnly(void* obj) |
| virtual void | setEffErrMat(const TMatrixD& errMat) |
| virtual void | setEffMeasVec(const TVectorD& measVec) |
| virtual void | setEnergyLoss(Double_t eloss) |
| virtual void | setHitAndErr(const TVectorD& newhit, const TVectorD& newerr, Int_t idx = 0) |
| virtual void | setHitChi2(Double_t chi2, Int_t idx = 0) |
| virtual void | setHitDriftTime(Double_t time, Double_t timeErr, Int_t idx = 0) |
| virtual void | setHitImpactAngle(Float_t alpha, Int_t idx = 0) |
| virtual Bool_t | setHitVirtPlane(const TVector3& origin, const TVector3& n, Int_t idx = 0) |
| virtual Bool_t | setHitVirtPlane(const TVector3& origin, const TVector3& u, const TVector3& v, Int_t idx = 0) |
| virtual void | setHitWeight(Double_t weight, Int_t idx = 0) |
| virtual void | setHitWeightHist(Double_t weight, Int_t iDaf, Int_t idx = 0) |
| virtual void | setNdafs(Int_t n) |
| static void | TObject::SetObjectStat(Bool_t stat) |
| virtual void | setStateCovMat(Kalman::kalFilterTypes stateType, const TMatrixD& fCov, Kalman::coordSys coord = kSecCoord) |
| virtual void | setStateProcMat(Kalman::kalFilterTypes stateType, const TMatrixD& fProc, Kalman::coordSys coord = kSecCoord) |
| virtual void | setStateProjMat(Kalman::kalFilterTypes stateType, const TMatrixD& fProj, Kalman::coordSys coord = kSecCoord) |
| virtual void | setStatePropMat(Kalman::kalFilterTypes stateType, const TMatrixD& fProp, Kalman::coordSys coord = kSecCoord) |
| virtual void | setStateVec(Kalman::kalFilterTypes stateType, const TVectorD& sv, Kalman::coordSys coord = kSecCoord) |
| virtual void | TObject::SetUniqueID(UInt_t uid) |
| virtual void | ShowMembers(TMemberInspector&) |
| virtual void | sortHits() |
| virtual void | Streamer(TBuffer&) |
| void | StreamerNVirtual(TBuffer& ClassDef_StreamerNVirtual_b) |
| virtual void | TObject::SysError(const char* method, const char* msgfmt) const |
| Bool_t | TObject::TestBit(UInt_t f) const |
| Int_t | TObject::TestBits(UInt_t f) const |
| virtual void | transform(const TRotation& transMat) |
| virtual void | transSecToVirtLay(Kalman::kalFilterTypes stateType, Int_t iHit, Bool_t bCovUD = kFALSE) |
| virtual void | transVirtLayToSec(Kalman::kalFilterTypes stateType, Int_t iHit, Bool_t bCovUD = kFALSE) |
| virtual void | TObject::UseCurrentStyle() |
| virtual void | TObject::Warning(const char* method, const char* msgfmt) const |
| virtual Int_t | TObject::Write(const char* name = 0, Int_t option = 0, Int_t bufsize = 0) |
| virtual Int_t | TObject::Write(const char* name = 0, Int_t option = 0, Int_t bufsize = 0) const |
protected:
| virtual void | TObject::DoError(int level, const char* location, const char* fmt, va_list va) const |
| void | TObject::MakeZombie() |
private:
| virtual HKalMdcHit* | getHitPtr(Int_t idx = 0) |
| virtual void | transformHit(const TRotation& transMat) |
| virtual void | transformStates(const TRotation& transMat) |
Data Members
public:
| enum TObject::EStatusBits { | kCanDelete | |
| kMustCleanup | ||
| kObjInCanvas | ||
| kIsReferenced | ||
| kHasUUID | ||
| kCannotPick | ||
| kNoContextMenu | ||
| kInvalidObject | ||
| }; | ||
| enum TObject::[unnamed] { | kIsOnHeap | |
| kNotDeleted | ||
| kZombie | ||
| kBitMask | ||
| kSingleKey | ||
| kOverwrite | ||
| kWriteDelete | ||
| }; |
private:
| Bool_t | bActive | Site is active/not active. |
| Double_t | chi2Inc | This site's contribution to chi^2 of the fit. |
| TMatrixD | effErrMat | ! Weighted error matrix of all competing hits in this site. |
| TVectorD | effMeasVec | ! Weighted measurement vector of all competing hits in this site. |
| Double_t | energyLoss | Energy loss from the first site to this site in MeV/particle charge in elementary charges. Sign depends on propagation direction. This number is positive for forward and negative for backward iteraton. |
| TObjArray* | hits | ! Stores all competing measurement hits. |
| HKalTrackState*** | trackStates | ! array with the track parameters for each track state in the sector coordinate system. |
Class Charts
{kind=link}
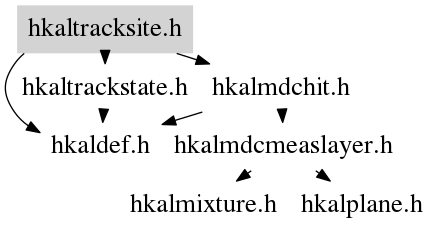{kind=link}
{kind=link}

Function documentation
HKalTrackSite(Int_t measDim, Int_t stateDim, Int_t stateDimVirtLay = 5)
Creates a dummy hit and track states. measDim: dimension of measurement vector. stateDimSec: dimension of the track state vectors in the sector coordinate system. stateDimVirtLay: dimension of the track state vectors in the virtual layer coordinate system.
void transformHit(const TRotation& transMat)
Transform the measurement hit coordinates and layer vectors using the rotation matrix transMat.
void transformStates(const TRotation& transMat)
Transform the track state vectors using the rotation matrix transMat. Since information about the measurement layer is needed, make sure the hit has not been transformed yet.
void calcJacLayToSec(TMatrixD& jac, const TVectorD& svLay, const HKalPlane& plane) const
Track states can be stored in two coordinate systems: the sector coordinate system common for all sites and a local coordinate system for this site defined by a virtual plane. This calculated the Jacobian matrix for the transformation function from virtual layer to sector coordinates. Output: jac: Jacobian matrix Input: svSec: State vector in virtual layer coordinates. plane: Virtual layer.
void calcJacSecToLay(TMatrixD& jac, const TVectorD& svSec, const HKalPlane& plane) const
Track states can be stored in two coordinate systems: the sector coordinate system common for all sites and a local coordinate system for this site defined by a virtual plane. This calculated the Jacobian matrix for the transformation function from sector to virtual layer coordinates. Output: jac: Jacobian matrix Input: svSec: State vector in sector coordinates. plane: Virtual layer.
void clearHits()
void sortHits()
void print(Option_t* opt = "") const
Prints information about the hit and track states for this site. opt: Determines what information about the object will be printed. If opt contains: "Hit": print information about hit's measurement coordinates and layer "Pred": print state vector and used matrices of the predicted state "Filt": print state vector and used matrices of the filtered state "Smoo": print state vector and used matrices of the smoothed state "Inv": print state vector and used matrices of the inverse filtered state If opt is empty all of the above will be printed. Only the state vector and covariance matrix are printed for all states. The content of unused matrices will not be printed: The propagator and process noise matrices are always stored in the filtered state. The projector matrix is stored in class HKalSystem. idx: Index of hit object in site.
void transform(const TRotation& transMat)
Transform the track state vectors and measurement hit coordinates and the hit's measurement layer using the rotation matrix transMat.
void transVirtLayToSec(Kalman::kalFilterTypes stateType, Int_t iHit, Bool_t bCovUD = kFALSE)
Track states can be stored in two coordinate systems: the sector coordinate system common for all sites and a local coordinate system for this site defined by a virtual plane. This functions calculates and stores the track state and covariance matrix in virtual layer coordinates from sector. Input: stateType: state to transform (kPredicted, kFiltered, kSmoothed, kInvFiltered) iHit: index of hit stored in site bCovUD: set to true if using the UD filter.
void transSecToVirtLay(Kalman::kalFilterTypes stateType, Int_t iHit, Bool_t bCovUD = kFALSE)
Track states can be stored in two coordinate systems: the sector coordinate system common for all sites and a local coordinate system for this site defined by a virtual plane. This functions calculates and stores the track state and covariance matrix in sector coordinates from virtual layer. Input: stateType: state to transform (predicted, filtered, etc.) iHit: index of hit stored in site bCovUD: set to true if using the UD filter.
TMatrixD const& getErrMat(Int_t idx = 0) const
Return the measurement covariance matrix.
idx: The index of the hit stored in this measurement site.
-1 will return the effective covariance which is
used for the annealing filter. This matrix is a weighted
mean of the measurement errors of all competing
hits and must be calculated by calling the calcEffErrMat()
function beforehand.
TVectorD const& getHitVec(Int_t idx = 0) const
Return the hit vector (measurement vector).
idx: The index of the hit stored in this measurement site.
-1 will return the effective measurement which is
used for the annealing filter. The effective measurement
is a weighted mean of the measurements of all competing
hits and must be calculated by calling the calcEffMeasVec()
function beforehand.
void getPosAndDirFromState(TVector3& pos, TVector3& dir, Kalman::kalFilterTypes stateType) const
Extracts a position and direction vector from a track state's parameters. Output: pos: returns the hit coordinate vector dir: returns the track direction vector Input: stateType: track state type (kPredicted, kFiltered, kSmoothed, kInvFiltered)
void setEffErrMat(const TMatrixD& errMat)
void setEffMeasVec(const TVectorD& measVec)
HKalTrackSite(Int_t measDim, Int_t stateDim, Int_t stateDimVirtLay = 5)
Double_t getHitWeightHist(Int_t iDaf, Int_t idx = 0) const
{ return getHit(idx).getWeightHist(iDaf); }void getHitWirePts(TVector3& wire1, TVector3& wire2, Int_t idx = 0) const
{ getHit(idx).getWirePts(wire1, wire2); }HKalTrackState const& getState(Kalman::kalFilterTypes stateType, Kalman::coordSys coord = kSecCoord) const
{ return *trackStates[coord][stateType]; }Int_t getStateDim(Kalman::coordSys coord = kSecCoord) const
{ return trackStates[coord][kPredicted]->getStateDim(); }Double_t getStateParam(Kalman::kalFilterTypes stateType, Kalman::kalStateIdx par, Kalman::coordSys coord = kSecCoord) const
{ return trackStates[coord][stateType]->getStateParam(par); }TVectorD const& getStateVec(Kalman::kalFilterTypes stateType, Kalman::coordSys coord = kSecCoord) const
{ return trackStates[coord][stateType]->getStateVec(); }TMatrixD const& getStateCovMat(Kalman::kalFilterTypes stateType, Kalman::coordSys coord = kSecCoord) const
{ return trackStates[coord][stateType]->getCovMat(); }TMatrixD const& getStatePropMat(Kalman::kalFilterTypes stateType, Kalman::coordSys coord = kSecCoord) const
{ return trackStates[coord][stateType]->getPropMat(); }TMatrixD const& getStateProjMat(Kalman::kalFilterTypes stateType = kFiltered, Kalman::coordSys coord = kSecCoord) const
{ return trackStates[coord][stateType]->getProjMat(); }TMatrixD const& getStateProcMat(Kalman::kalFilterTypes stateType, Kalman::coordSys coord = kSecCoord) const
{ return trackStates[coord][stateType]->getProcNoiseMat(); }void setHitAndErr(const TVectorD& newhit, const TVectorD& newerr, Int_t idx = 0)
{ getHitPtr(idx)->setHitAndErr(newhit, newerr); }void setHitDriftTime(Double_t time, Double_t timeErr, Int_t idx = 0)
{ getHitPtr(idx)->setDriftTime(time, timeErr); }Bool_t setHitVirtPlane(const TVector3& origin, const TVector3& n, Int_t idx = 0)
{ return getHitPtr(idx)->setVirtPlane(origin, n); }Bool_t setHitVirtPlane(const TVector3& origin, const TVector3& u, const TVector3& v, Int_t idx = 0)
{ return getHitPtr(idx)->setVirtPlane(origin, u, v); }void setHitWeightHist(Double_t weight, Int_t iDaf, Int_t idx = 0)
{ getHitPtr(idx)->setWeightHist(weight, iDaf); }void setStateCovMat(Kalman::kalFilterTypes stateType, const TMatrixD& fCov, Kalman::coordSys coord = kSecCoord)
{ trackStates[coord][stateType]->setCovMat(fCov); }void setStatePropMat(Kalman::kalFilterTypes stateType, const TMatrixD& fProp, Kalman::coordSys coord = kSecCoord)
{ trackStates[coord][stateType]->setPropMat(fProp); }void setStateProjMat(Kalman::kalFilterTypes stateType, const TMatrixD& fProj, Kalman::coordSys coord = kSecCoord)
{ trackStates[coord][stateType]->setProjMat(fProj); }void setStateProcMat(Kalman::kalFilterTypes stateType, const TMatrixD& fProc, Kalman::coordSys coord = kSecCoord)
{ trackStates[coord][stateType]->setProcNoiseMat(fProc); }void setStateVec(Kalman::kalFilterTypes stateType, const TVectorD& sv, Kalman::coordSys coord = kSecCoord)
{ trackStates[coord][stateType]->setStateVec(sv); }